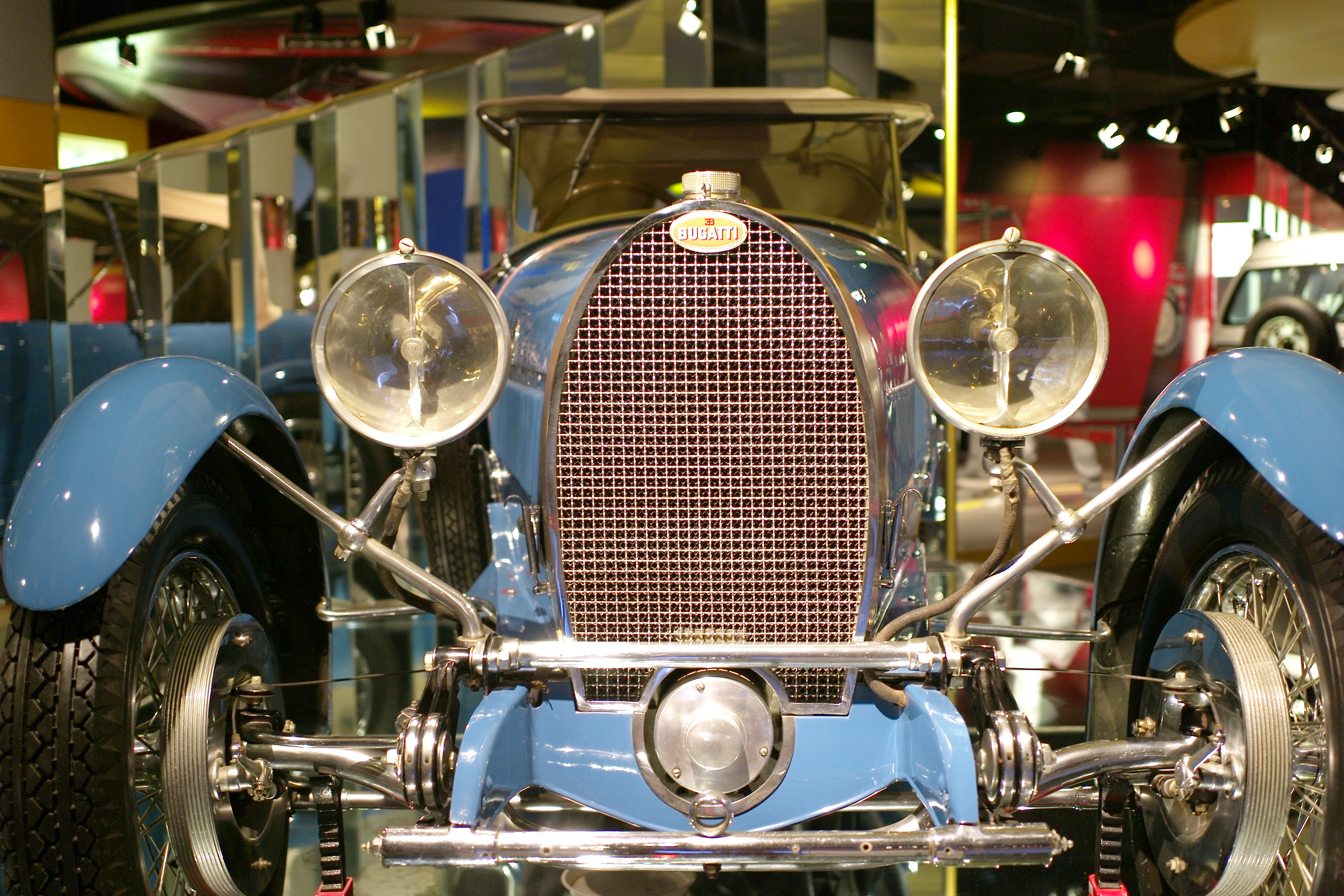
sigma sd1m + 18-35mm f1.8
sigma sd1m + 18-35mm f1.8
适马,野马
我不是幕强的人,不是埃隆马斯克厉害了,就要五体投地学习……,不是这样的人。人群里总有一些人是有自己想法的,不慕强。勾起互联网初期趣事,一摄影网站组织了两个老摄影师讲课,一个初代网红甲,另一个乙。聚会饭后,各领一桌人,慢慢我们这只剩三人,其他人都扎堆到网红老师那了(o^^o)……。不知道有什么摄影箴言非要这么扎堆的学习……,反正我没去。不过分追捧权威,可能是基因里就带了,现在看,相机机身制造的世界里有一匹倔强的野马——SIGMA相机。
野,就不要修饰它了
可能和其他人不一样,他们都说适马相机的raw必须后期,我用了适马SD1M拍照后反而不爱后期了,拍x3的raw格式,然后统一批量自动导出jpg。导出jpg品质也不用12的最高品,10就够了。适马到了x3 merrill已超越所需清晰度了,就像云海超越了棉花糖。
适马单反,自成一脉
用了适马单反才知道,适马自家相机是sa卡口,而这个卡口不是数码时代才有的,胶片时代就有了。一查,sa7、sa9胶片单反,样子几乎和sd9、sd10、sd14、sd15一样。菜单逻辑、转盘操控,都一脉相承下来了,适马fp上的大转盘原来也是胶片时代就有了。
当然,可能对焦慢也一起继承下来了……,这桀骜不驯的风格肯定是不能用聪明来形容了。给这头倔驴几鞭子,你就不能向佳能学学营销么,你就,你就不能像尼康学学什么么。可他似乎就不低头,就是我行我素。我为什么学他们呀,你喜欢自去买他们好了,我是我自己呀,我是适马相机呀。是啊,我们为啥非要模仿别人的人生呢,我们要活出自己啊,固然有缺点,但这才是我自己呀。
谈适马x3 merrill,绕不开中画幅
最近一直用适马x3,也和越来越偏向传统绘画审美趋向有关系。看水墨山水画,视线是可以无限游走的,无论中心还是边缘,都可观看品味的清晰度。适马sd1m可以配合18-35mm镜头,获得整体画面清晰,这些特性与我最近的审美趋向不谋而合。
抛开背景虚化,120或者大画幅更接近传统审美,长焦距镜头畸变小,配合大底儿、高像素,支持全画卷游走观看。适马SD1本想竞争对手是中画幅,一个aps-c凭什么挑战中画幅,是来碰瓷的吧?可等我用了之后才感慨,单论画质,它不惧任何100%放大甚至200%-300%的像素级放大。中画幅的清晰不是依靠200%的放大,而是20%的缩小——x3和马赛克的核心差别所在。可见当年定位对手中画幅,不虚。
决定数码画质的上限,是镜头还是传感器
适马x3 merrill清晰纹理,细节反差优秀,这点就是徕卡的m机(无论是ccd还是cmos)配徕卡最好的aa镜头也不行。徕卡在油润丝滑过度影调上无敌,但在清晰度上一样败给x3。原来传感器的清晰度才是决定画质上限的那个最重要的环节。当然,这也不是说镜头无关紧要,适马后来出的art镜头才能满足x3 merrill的清晰度要求,老款的适马也不行。据说art镜头的诞生也是为了满足x3才开启的全新产品线。
要踏踏实实的清晰度,特别是我最近想拍的小景照片,适马x3已经是超需求的满足了。马赛克相机忽然都不再具备吸引力了。马赛克传感器在清晰度上怎么折腾,也突破不了算法猜像素的宿命,怎么也逃脱不了缩图带来的失落感。
玩cmos传感器,就不要太纠结清晰度了,一个像素至少2/3的数据来自于算法猜测,比来比去有什么意义呢。算法介入对模糊、虚化、强化规则性边缘锐度是有利的,对真实清晰度是渐行渐远的。x3这种真实度就算偶尔有白平衡不准,也不影响的。哎cmos就踏踏实实玩玩镜头味道就行了,千万别拿短处和x3比。
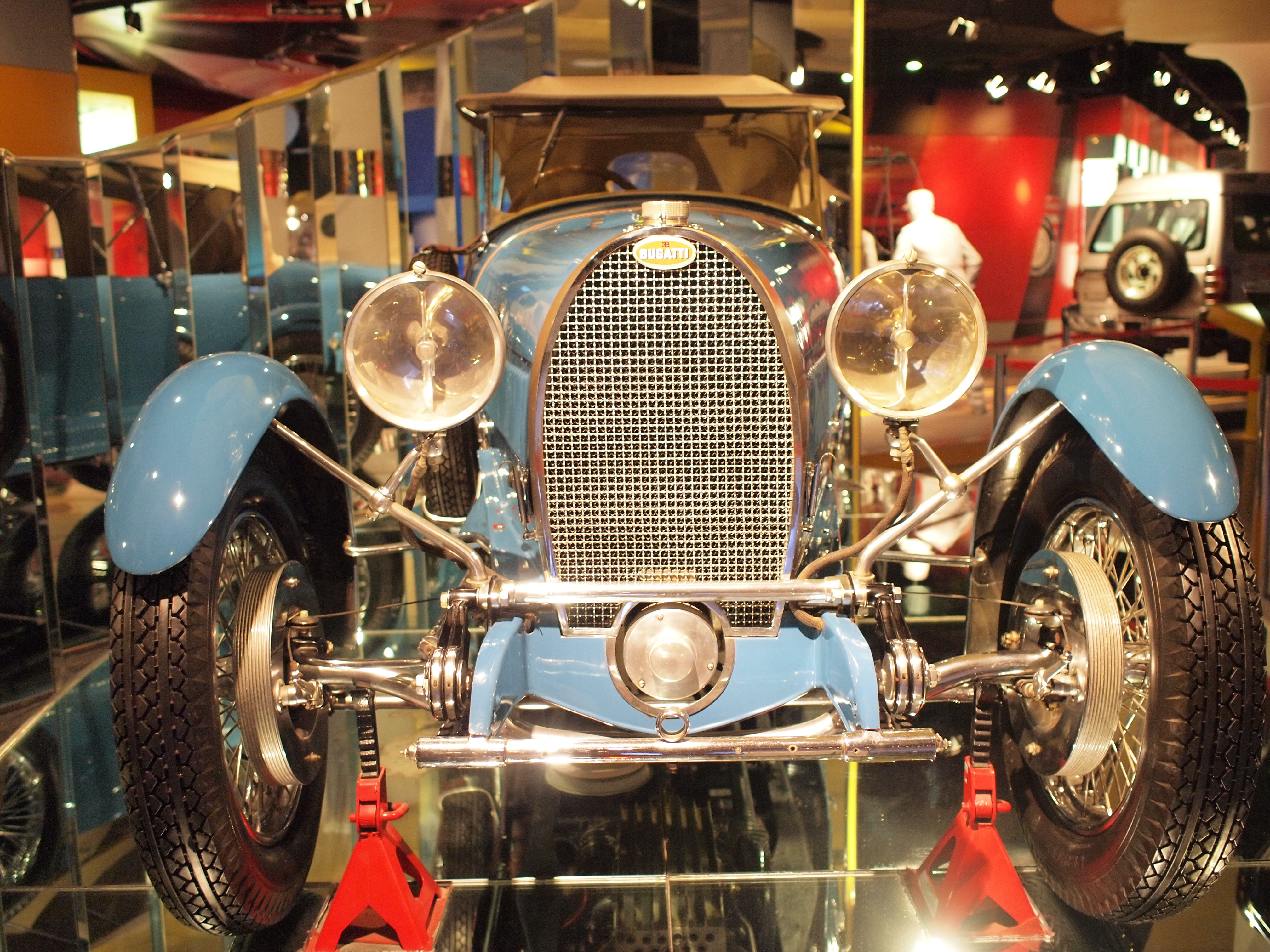
 sigma sd1m + 18-35mm f1.8
sigma sd1m + 18-35mm f1.8
马赛克油画 vs. foveon水墨画
似乎很多油画远看都很写实,但禁不起近距离细看,细看就是各种色块堆叠,说也神奇,多数油画都要要退后五步才行。想到这里,我就明白了,为什么马赛克传感器能如此流行,其实多数人,可能早就默认了这种放大看不重要的心态,根本不认为放到100%看清晰有什么了不起,缩图看不就行了么。
但是水墨画可就不这样了,水墨笔法精妙绝伦,力透纸背那是要恨不得趴上去看才过瘾的。远观是意境,近看是力道,是不带糊弄的。foveon传感器就是不带猜测色彩的,实打实的一个像素是一个像素,就像毛笔的笔锋每一丝都是画面的一部分。不知怎的,可能是大光圈镜头用多了,我现在对分毫毕现越来越痴迷了。也可能我有些不那么喜欢油画,总觉得那玩意到不了的精神层面,还得水墨才能有那种真正的穿透力,就像foveon x3的那种感觉。
过去我不敢拍这种草地,马赛克拍草地总是会带来一些黏连感,在一些不规则的杂乱地点出现一些不自然模糊粘连感,这是马赛克算法失灵的地带,foveon却可以轻松化解。我甚至有时候在怀疑,自己喜欢徕卡大光圈虚化效果,是不是被逼的,因为自己有一种对过瘾的“极致”追求,而当年的马赛克并没有在清晰度上给予过瘾的反馈,不得不投入到了徕卡光圈全开的怀抱……。也许我当年先投入到x3 merrill,保不齐就不会玩徕卡了(。ì _ í。),“早知有适马,何必玩徕卡”呀!
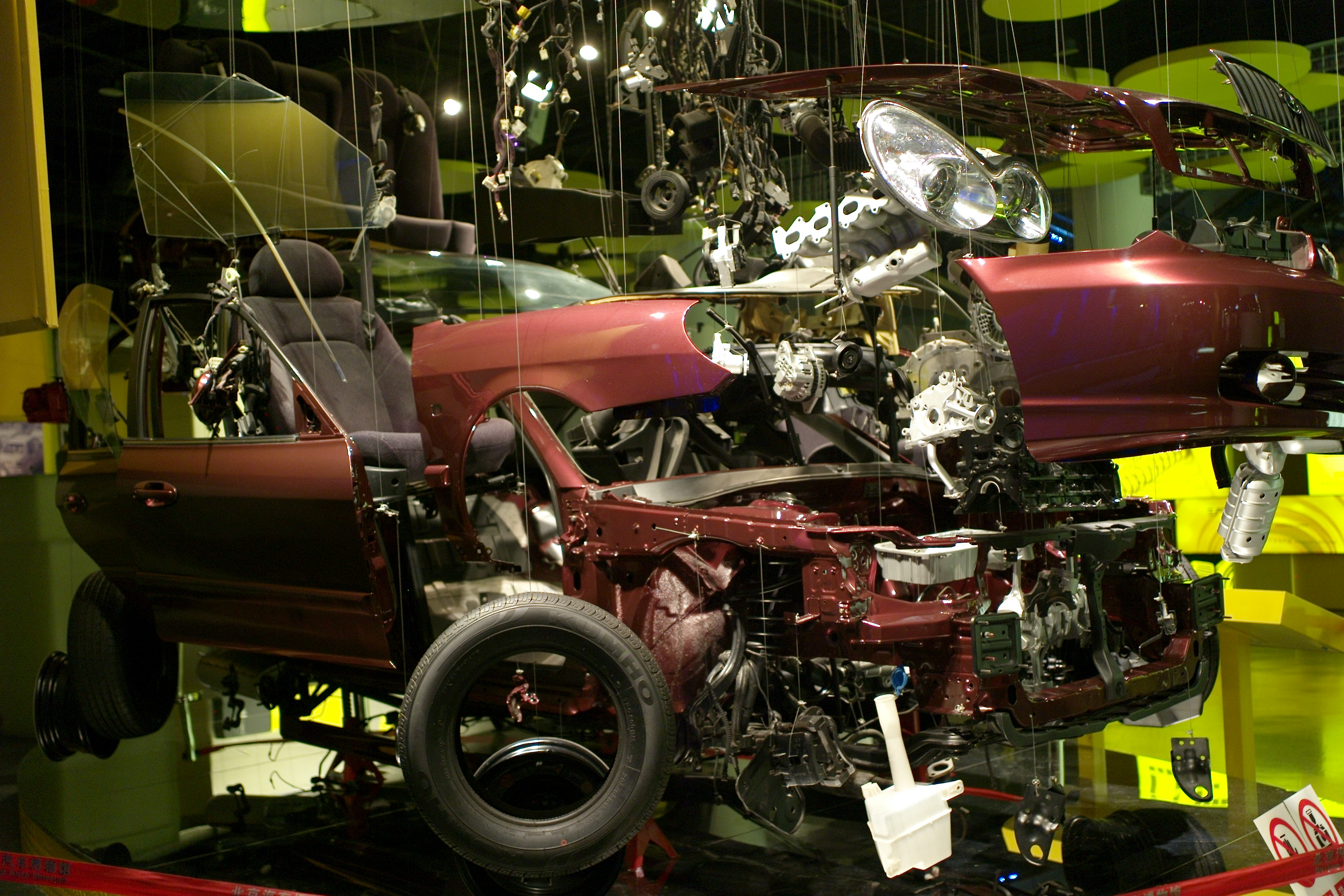
 sigma sd1m + 18-35mm f1.8
sigma sd1m + 18-35mm f1.8
当然,还有一种可能,如果我早年玩适马sd1m,也许现在正在写徕卡镜头全开如何如何过瘾的文章(o^^o),或许正在写徕卡m8、m9如何如何具有胶片质感的文章,历史没有假设,发生过的每一天都有它的意义,嘻嘻嘻。
适马sd1m对比dp1m、dp2m怎么选
适马SD1M不要和任何单反比,也不要和任何微单比。能和他对比的只有适马自己家的dp1m、dp2m和dp3m,其他机器的画质还不足以撼动它的地位。在自动对焦速度、准确度上,其他任何相机又轻松击败了适马sd1m,甚至它们胶片时代的自动对焦都可以击败sd1m。也许是清晰度高,对精度要求高,它的对焦速度不如自家前代的sd15,但准确度比sd15好一些。
我是先买了dp1m、dp2m之后才买的sd1m。可换镜头就会进灰尘,小光圈拍有灰点子,dp系列防尘好,所有sd1m不是我首选。
再说,dp系体积小巧,画质几乎一样甚至镜头更优秀,所以sd1m最大的竞争对手其实是dp1m和dp2m,至少对我来说是这样的。单独论画质和对焦精确度、对焦速度,dp都比sd更占优势……
但是,当用了sd1m以后,dpm出场时间被大幅压缩,可能是取景器依赖,尽管给dpm配了外置取景器,但是单反的可靠性、皮实程度、随时观察,还是比dp要顺手一些。
适马sd1m配合18-35mm f1.8,实在是太重了,全当健身了。
适马sd1m的操控并不觉得难用,习惯之后反而挺简单,因为本来我也不爱调整参数。sony的菜单才是侮辱智商的存在……
继续阅读适马SD1M不是口袋里的中画幅,适口袋外的野马